MAS622J Final Project - Aisha Walcott - Fall 2006
Introduction
Data
Features
Methods and Results
Conclusions
Overview
A Swarm is a collection of robots that execute local interactions in order to create a global behavior. The Swarm are primarily limited by communication range (1m). Swarm behaviors are achieved through the development of a suite of novel distributed and graph-based algorithms, applied to large numbers of robots (eg. 100+). For more information on the Swarm please see the Swarm website.
Note there is no guarantee on the exact number of robots that perform each behavior, and it possible that robots "leave" a behavior if, for example, if the robot's battery runs low. Also, it takes a number of time steps before the Swarm achieves their intended goal behavior and reaches steady state. Below are a few example clips of Swarm behaviors.
Final Presentation (download, view online)
Figure
1: Swarm videos executing Disperse and Orbit behaviors
 |
 |
Motivation
Envision a scenario in which hundreds of Swarm robots are equipped with sensing technology and sent out to explore a disaster site. Then a team of autonomous aerial vehicles (AAVs) are sent out to "assist" the swarm. The AAVs must be able to determine what tasks (behaviors) the Swarm are doing by using vision and minimal communication, without knowing the explicit state of each individual swarm bot. The overall objective of this work is to create a recognition system, such that a robot can recognize Swarm behaviors.
Project Goals
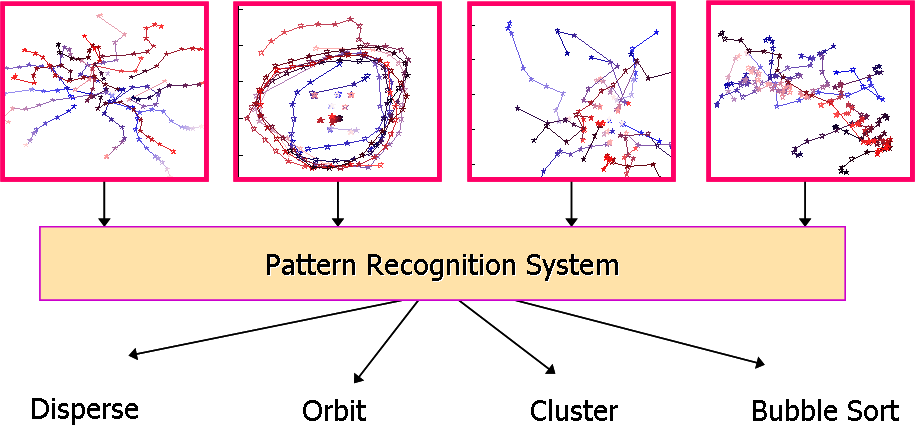
The goals of this project are to collect and process data sets of the Swarm executing complex, high-level behaviors. The aim is to determine which of four behaviors the Swarm are executing: Cluster, Disperse, Bubble Sort and Orbit. This is achieved by applying pattern recognition techniques. Below is an example of the four behaviors plotted in matlab, showing the robot positions over time.
Figure
2: Overview of project goals. Determining what behavior the Swarm is
executing.