
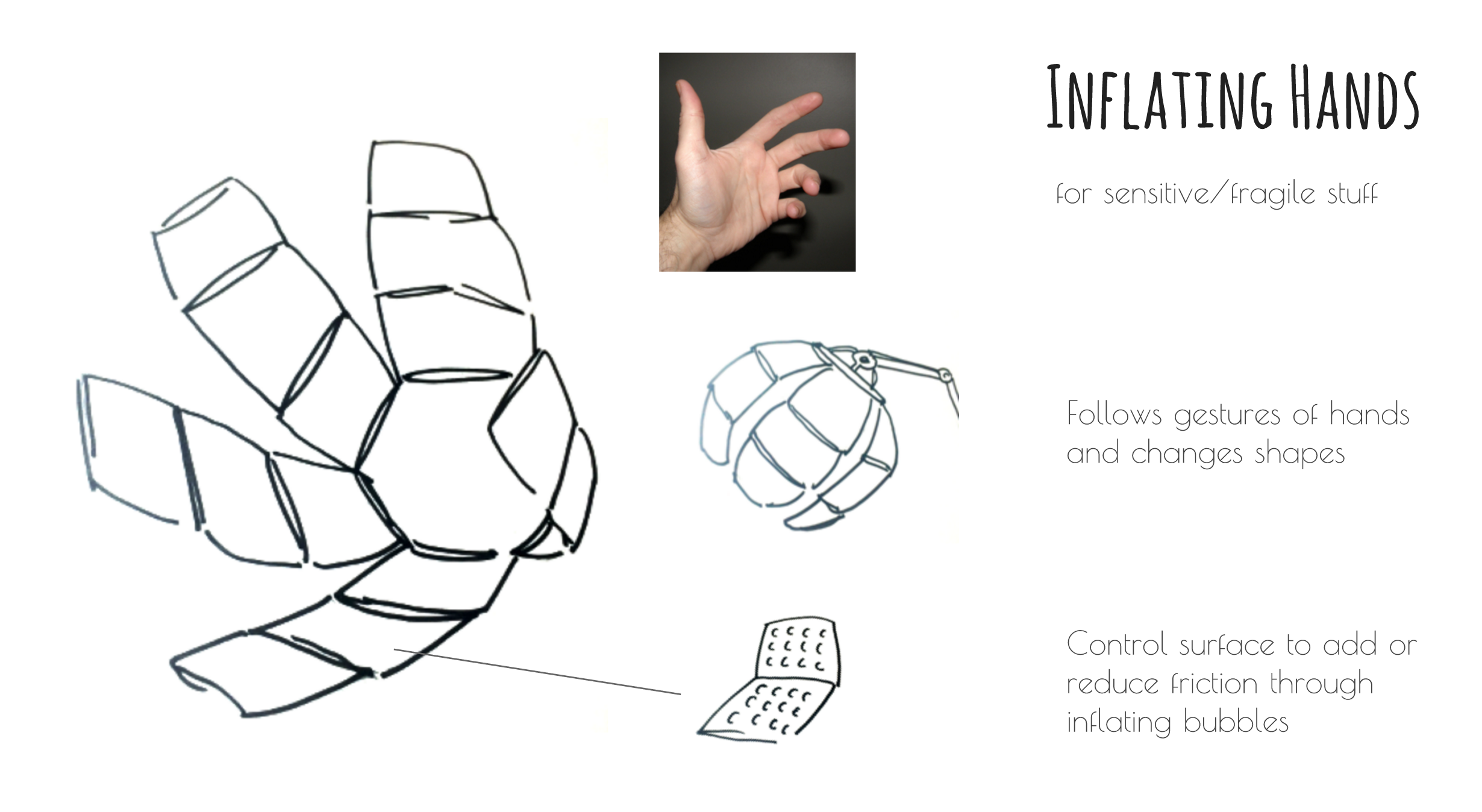
Inflating hands is a project simulating our hands to help people manipulate sensitive or fragile stuff. It would use Pneuduino to inflate or deflate rubber, and change the shape of rubber to a shape shown as our control hands’ gestures. In order to create friction to hold, grab, play with stuff with different shapes and weight, the surface of rubber materials are designed with bubbles. The friction of the rubber could be controlled by inflating or deflating the bubbles on its surface.
I like the idea of friction-changing surfaces as tools for augmenting our manipulation capabilities. But when would we not want maximum friction when picking something up? Are there other material properties that contribute to good manipulators? How is this more than a remote-control soft robot arm? Is there an interaction with the device itself, or does it have any autonomy? Does it have digital affordances like copy/paste/scale/rotate that could be useful for manipulation?
-Dan